2020年,轻舟智航推出了第一代专注城市复杂交通场景的自动驾驶解决方案「Driven-by-QCraft」,适应于城市公开道路上的多种复杂路况,并可高效部署于多类车型。
在过去两年多中,「Driven-by-QCraft」快速迭代,持续升级,并在今年5月推出了最新一代的车规级前装量产自动驾驶方案,助力车企实现城市NOA方案的全面落地。

来自诗人李白,轻舟智航自动驾驶品牌名称正式发布
今天,轻舟正式将其自动驾驶解决方案「Driven-by-QCraft」命名为「轻舟乘风」,它涵盖车载软件、车载硬件和数据自动化闭环等多个方面,可以提供轻舟智航最前沿的感知、PNC等能力,为最终用户带来更安全、更便捷、更舒适的体验。
「轻舟乘风」取自诗句「长风破浪会有时,直挂云帆济沧海」。这两句诗出自唐代诗人李白的《行路难》,表达的是一种历经坎坷,但仍然无比坚定的信念,也充分彰显了轻舟智航的价值主张:基于数据,成于感知,用PNC引领城市NOA;其远景则是携手生态伙伴,打造使用广阔使用范围的自动驾驶解决方案 。
轻舟智航,杀入城市NOA主赛道
城市NOA,今年自动驾驶市场被提及最多的专业词汇,作为专注L4自动驾驶的初创公司,轻舟智航看到了其中的商机,城市NOA需要处理的问题和L4面临的问题非常相似,真正做好城市NOA面临诸多难题:
传感器和计算需要符合车规级,由此带来的成本、功耗限制,需要通过更强的算法框架优化和工程化能力来解决;面对更广泛的ODD使用场景,需要通过更高效的数据利用,以数据驱动实现更强泛化性;

针对城市中各种复杂的交通参与者互动和博弈场景,需要在确保安全性的前提下,更聪明地进行预测、规划和控制,实现更高行车效率。
因此,城市NOA是辅助驾驶的天花板,也是无人驾驶的入门槛。而依托L4以及robobus积累的经验和技术,轻舟智能针对上面的难题,带来了自己的城市NOA解决方案。
一颗激光雷达的城市NOA是当前阶段最务实的方案?
既然从L4转战L2,那么轻舟智航的L2方案就很有看点,他们的思路很清晰,主要围绕单激光雷达+视觉传感器展开。轻舟智航的年轻工程师们认为,相较于纯视觉方案,一颗激光雷达的城市NOA可在保证安全性的前提下,实现更多场景,最优性价比。

目前,行业内涵盖多种辅助驾驶配置方案,下至纯视觉、低算力平台的低配方案,上至配备激光雷达,搭载双NVIDIA DRIVE Orin或双地平线征程5计算平台的高配方案。

在当前阶段,由于道路上充满复杂多样的障碍物和Corner Case场景,纯视觉方案很难应对中国的城市NOA需求。而激光雷达能够提供精确的3D测距,可以及时捕捉准确物体的位置、形态、大小、运动状态等信息,便于系统及时做出更为安全且舒适的规避动作,有效应对多种Corner Case难题。

轻舟智航的城市NOA主张是在保证安全性的前提下,实现高性价比。同时,他们也认为这是当前激光雷达方案中最务实的城市NOA方案,有望更快「上车」,推动城市NOA的快速落地。这里还要多说一句,轻舟智航的城市NOA总体也属于轻地图,重感知的范畴,这里面既有城市内高精度地图
至于特斯拉的纯视觉路线,可能真的不够中国特色。
多传感器融合,轻舟智航带来的思路够新吗?
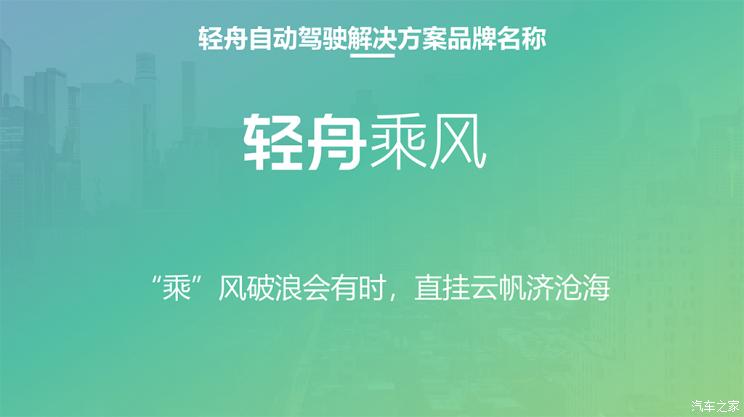
主流的融合方案包括前融合(数据级融合)、中融合(特征级融合)和后融合(目标级融合)三种。不同融合方案各有优劣,有效的融合结果才能给下游任务输出可靠的信息,为车辆做出安全的预测和决策提供保障。
前融合可以实现更高质量的融合效果,但对于不同传感器的时间同步性和空间标定的要求非常苛刻。而后融合的解耦性更强,但依赖经验丰富、工程素养良好的工程人员编写基于经验的规则,同时需要大量的仿真、实车测试以获得更广的覆盖度,并且可扩展性有限,工程投入边界收益低。
轻舟智航的感知算法通过「前中后穿插融合」,通过激光雷达、毫米波雷达、视觉等多传感器融合,感知模型可在不同阶段充分利用不同传感器信息,让不同传感器优势互补,可以避免单模信息丢失,实现更早的多传感器信息共享,得到更优传感器融合结果,从而可以更准确更精细地感知动静态物体及状态信息,避免各类误检和漏检,精度高且鲁棒性强。
既然说到感知,接下来我们自然而然就应该聊到感知方案。就像前段时间小鹏汽车在科技日上推出的Xnet多相机、多帧数据输入方案,轻舟智航OmniNet也是类似的方案。
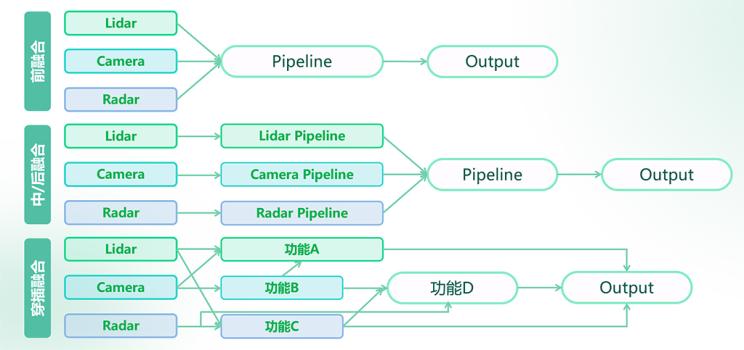
以一个神经网络即可实现视觉、激光雷达、毫米波雷达在BEV(Bird’s Eye View)空间和图像空间上输出多任务结果。相较传统方案,OmniNet在实际应用中可节省2/3的算力资源,并拥有更高的感知融合精度和模型迭代效率,而且可以低成本适配不同厂家的传感器配置,更轻量、更高效、更灵活地满足城市NOA的量产需求。
轻舟智航此次提出的OmniNet是应用于前中融合阶段、实现数据/特征融合的全任务大模型,也是首个可在量产计算平台上实现时序多模态特征融合的大模型。利用一个神经网络模型,将视觉、毫米波雷达、激光雷达等数据通过前融合和BEV空间特征融合,让本来独立的各个计算任务通过共享主干网络(backbone)和记忆网络(memory network)进行高效多任务统一计算,最终同时在图像空间和BEV空间中输出不同感知任务的结果,为下游的预测和规划控制模块提供更丰富的输出。
城市NOA时代,PNC定高下?
PNC,又一个自动驾驶领域的名词,它的全称是Planning and Control,在车端涵盖导航、预测、决策、规划、控制等核心模块,以及HMI、环境感知、地图定位等支持模块。
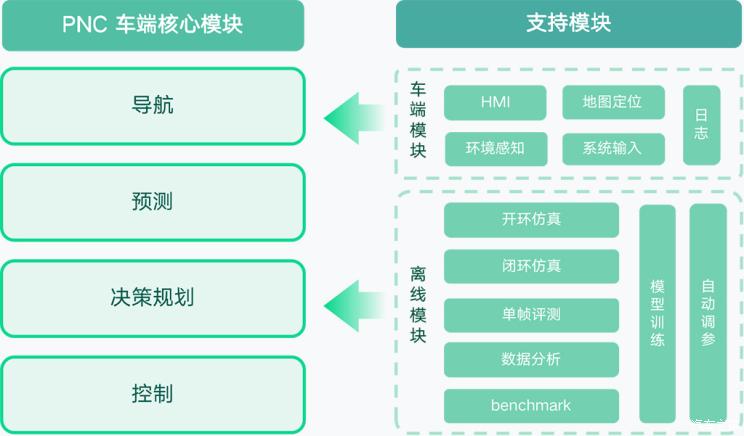
PNC的离线模块可以收集、查询、测试数据,训练模型,通过仿真分析模型和算法效果,最后再将模型和算法效果反哺给车端模块。简单的说,它就是打磨城市NOA的训练场,在这个训练场,轻舟智航可以更迅速且精准的完成对NOA的基础功能训练和特殊场景升级,从新手快速成长为老司机。
独家的时空联合规划
通常来说,业界采用的是「时空分离规划」,也就是把「对轨迹的规划」拆分成两个子问题,即路径规划(path planning)和速度规划(speed planning)。路径规划对应于横向控制,即方向盘;速度规划对应于纵向控制,即刹车或油门,这种决策机制也就是通常所谓的「横纵分离」。
「时空分离规划」相当于先为车辆「铺好」一段铁轨,再在铁轨上计算速度。这种方式非常依赖手写规则调整车辆行为,也非常依赖大量路测来验证算法。
轻舟智航自研「时空联合规划算法」打破了思维定势,同时考虑空间和时间来规划轨迹,而不是先单独求解路径,在路径基础上再求解速度从而形成轨迹。将「横纵分离」,升级为「横纵联合」,能直接在x-y-t(即平面和时间)三个维度的空间中直接求解最优轨迹。
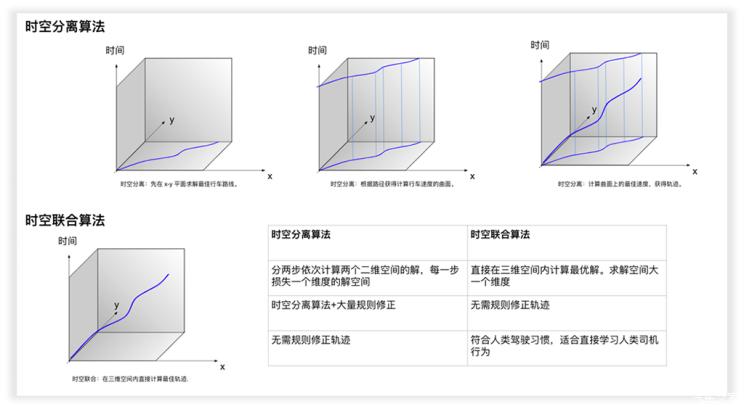
同时考虑空间和时间的「时空联合规划算法」,也是公认的更优的规划算法,更适合国内复杂的路况。
这种策略让车辆在行驶时,能够比普通驾驶员甚至老司机「开得更好」,特别是在面临动态障碍物的交互时,能提前把握最好的时机,选出最佳行车轨迹,更流畅地完成车辆间的博弈,并且不会出现反复急刹的情况。
不仅如此,在多车道行驶时,车辆还可以通过判断前方车流量和车速,灵活地变道选择更快的路线,而不会「死板地」跟着前车缓行。更聪明、更灵活,行车效率更高效。
因此,采用「时空联合规划」的车辆,可在保证安全性的基础上,用更短时间、更舒适的体验,把乘客带向目的地。而且越是在复杂的路况环境中,越能带来更为显著的效率和体感提升。
写在最后:
从目前的情况看,轻舟智航已不再单纯是一家做Robobus的L4自动驾驶公司,更是在快速推进自动驾驶前装量产,同时它也有成为最好的自动驾驶解决方案供应商的野心。
而随着越来越多供应商入局城市NOA,轻舟智航也面临的很多挑战。不可否认,L4级自动驾驶积累的技术经验、PNC、感知融合模型等技术确实给了它竞争的资本,但更快的被车企认可,拿下更多前装订单,依然是当务之急。好消息是轻舟智航已经拿下了某家车企的订单,而它的产品也即将亮相,最终能否赢得消费者的青睐,也将成为轻舟智航的“期末考试”,我们一起期待吧。(图/文 本站 冷晓阳)



